Магнитный или электромагнитный эллиптический? Насколько они разные? – 1xmatch
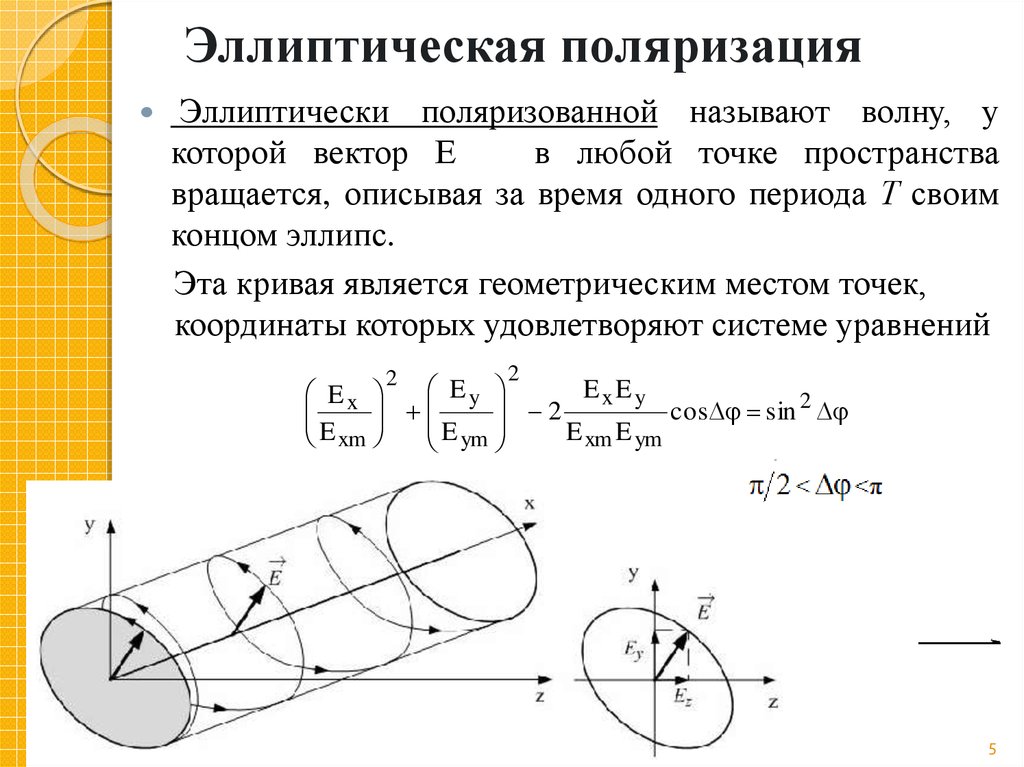
Эллиптические кросс-тренажеры являются одним из самых популярных фитнес-тренажеров. Неудивительно, ведь они помогают не только улучшить состояние, но и сбросить лишние килограммы или нарастить мышечную массу. И при выборе модели для дома, что лучше купить: магнитный или электромагнитный кросс-тренажер?
Магнитная эллиптическая и электромагнитная система регулирования сопротивленияВ магнитных эллиптических тренажерах сопротивление создается на маховике с помощью магнитного поля. Его создают магниты, окружающие колесо с двух сторон (укреплены на специальном рычаге) — один притягивает другой и таким образом тормозит элемент между ними. Чем ближе магниты друг к другу, тем сильнее создаваемое сопротивление, и пользователь должен прилагать больше усилий для перемещения маховика.
В магнитных моделях уровень сопротивления регулируется вручную, с помощью специальной ручки или с помощью компьютера. Поворот ручки перемещает рычаг с магнитами ближе или ближе к маховику соответственно, в то время как компьютер управляет двигателем, который перемещает рычаг.
Поворот ручки перемещает рычаг с магнитами ближе или ближе к маховику соответственно, в то время как компьютер управляет двигателем, который перемещает рычаг.
В случае компьютерной настройки в распоряжении пользователя имеется небольшой светодиодный дисплей, на котором он указывает ожидаемый уровень торможения маховика, поэтому для его замены ему даже не нужно слезать с велосипеда. Примером такой модели является магнитный эллиптический кросс-тренажер Sapphire Thunder II SG-511E.
Электромагнитный эллиптический также создает сопротивление, основанное на действии магнитного поля. Разница в том, как это регулируется. В электромагнитном эллиптическом кросс-тренажере тормозная сила маховика регулируется электромагнитами, управляемыми электродвигателем, соединенным с микропроцессором. В этом случае электромагниты не должны двигаться для изменения силы сопротивления — ее регулирование влияет на силу, с которой магниты воздействуют на колесо. Его можно выполнять с помощью компьютера — он задается выбором нужного уровня, не слезая с велосипеда, — или автоматически.
Автоматическое регулирование является исключительно удобным решением, так как не требует размышлений о том, какой уровень сопротивления будет наиболее эффективным и одновременно безопасным. Компьютер постоянно анализирует тренировочный пульс (для чего использует датчики сердечного ритма, установленные в руле) и на его основе изменяет интенсивность упражнений.
В чем еще отличие магнитного эллиптического тренажера от электромагнитного кросс-тренажера?Система формирования и регулирования сопротивления — не единственное различие между двумя типами эллиптических кросс-тренажеров. Первое принципиальное отличие заключается в том, что электромагнитный кросс-тренажер для своей работы требует постоянного доступа к электричеству. Магнитный, с другой стороны, когда сила торможения управляется ручкой, а не компьютером, он не использует электричество. Поэтому дешевле в эксплуатации.
В чем еще разница между двумя типами эллиптических тренажеров?
- диапазон регулировки сопротивления – чрезвычайно важный параметр, как для начинающих спортсменов, так и для профессиональных пользователей.
 Это зависит от того, насколько точно вы сможете отрегулировать уровень сопротивления маховика в соответствии со своими потребностями. Электромагнитный эллиптический в этом отношении гораздо точнее;
Это зависит от того, насколько точно вы сможете отрегулировать уровень сопротивления маховика в соответствии со своими потребностями. Электромагнитный эллиптический в этом отношении гораздо точнее; - объем работы – электромагнитные кроссы работают практически бесшумно, что особенно оценят люди, проживающие с членами семьи или арендаторами. Магнитные модели тоже достаточно тихие, но электрические версии в этом отношении даже лучше;
- цена – важна не только стоимость эксплуатации, но и цена самого устройства. Магнитный эллиптический кросс-тренажер предлагает очень хорошее соотношение цены и качества. Электромагнитный – самый дорогой из всех видов эллиптических тренажеров. Высокая цена, конечно же, отражается на оснащении — например, упомянутая автоматическая подстройка уровня сопротивления к пульсу.
 Это зависит от того, насколько точно вы сможете отрегулировать уровень сопротивления маховика в соответствии со своими потребностями. Электромагнитный эллиптический в этом отношении гораздо точнее;
Это зависит от того, насколько точно вы сможете отрегулировать уровень сопротивления маховика в соответствии со своими потребностями. Электромагнитный эллиптический в этом отношении гораздо точнее;Выбор между этими двумя популярными типами эллиптических кросс-тренажеров зависит в первую очередь от ожиданий. Электромагнитные модели рекомендуются людям, которые рассчитывают на максимальную «поддержку» от устройства, а также пожилым людям или после инфаркта или при гипертонии. Имеющаяся в этих передовых тренажерах автоматика обеспечит безопасность занимающегося и не даст ему перегрузиться. Тренирующемуся достаточно определить уровень ЧСС, после чего следует замедлить темп, чтобы тренирующийся опустился на более низкий уровень сопротивления. Он будет сохранять его до тех пор, пока частота сердечных сокращений пользователя не вернется к соответствующему значению.
Электромагнитные модели рекомендуются людям, которые рассчитывают на максимальную «поддержку» от устройства, а также пожилым людям или после инфаркта или при гипертонии. Имеющаяся в этих передовых тренажерах автоматика обеспечит безопасность занимающегося и не даст ему перегрузиться. Тренирующемуся достаточно определить уровень ЧСС, после чего следует замедлить темп, чтобы тренирующийся опустился на более низкий уровень сопротивления. Он будет сохранять его до тех пор, пока частота сердечных сокращений пользователя не вернется к соответствующему значению.
С электромагнитным кросс-тренажером профессиональные спортсмены, которые ожидают максимальной точности в определении уровня сопротивления, также выиграют. Регулирование настолько чувствительно, что его можно без особых проблем адаптировать к индивидуальным строгим требованиям.
Магнитные модели это оборудование для всех. От новичков, через профессионалов, полностью здоровых людей до выздоравливающих или имеющих проблемы с дыхательной и кровеносной системой. Несомненно, они являются более дешевым решением, их цены начинаются примерно с 600 злотых, тогда как за электронную версию вам придется заплатить более 1000 злотых (даже за самую дешевую модель).
Несомненно, они являются более дешевым решением, их цены начинаются примерно с 600 злотых, тогда как за электронную версию вам придется заплатить более 1000 злотых (даже за самую дешевую модель).
А если вы все еще не уверены, какой эллиптический кросс-тренажер выбрать, ознакомьтесь с нашей статьей «Какой кросс-тренажер для дома?» Что следует учитывать при выборе эллиптического кросс-тренажера?».
:
рейтинг топ-11 по версии КП
Эллиптические тренажеры, которые также называют орбитреком или эллипсоидом, сочетают в себе качества велотренажера, беговой дорожки и степпера. Их главная особенность — траектория движения, которая напоминает эллипс. Это позволяет убрать лишнюю ударную нагрузку с суставов. Тренировки на подобных тренажерах максимально бережно относятся к опорно-двигательному аппарату. Потому часто применяются при реабилитации пострадавших. Также это очень распространенный вариант тренажера для дома.
Среди женщин очень популярны тренировки на эллипсоиде, поскольку это не только хорошая аэробная нагрузка, но и силовая тренировка мышц. В зависимости от вида орбитрека нагрузка в разной степени ложится на квадрицепсы, двуглавую мышцу бедра, ягодичные и икроножные мышцы, а также работают мышцы рук, спины и пресса. Если вы решили приобрести эллипсоид, то вам будет полезен наш рейтинг лучших эллиптических тренажеров в 2023 году и советы от знатока в вопросах физической активности, Анны Соколовой, которая специализируется на различных направлениях фитнеса.
В зависимости от вида орбитрека нагрузка в разной степени ложится на квадрицепсы, двуглавую мышцу бедра, ягодичные и икроножные мышцы, а также работают мышцы рук, спины и пресса. Если вы решили приобрести эллипсоид, то вам будет полезен наш рейтинг лучших эллиптических тренажеров в 2023 году и советы от знатока в вопросах физической активности, Анны Соколовой, которая специализируется на различных направлениях фитнеса.
Выбор редакции
HyperFit Reisender U13
HyperFit Reisender U13. Фото: ellipticaltrainer.hyper-fit.ruУ этого компактного тренажера по-настоящему уникальный формат исполнения – «3 в 1». Он выполняет функции не только эллипсоида, но и степпера, велотренажера. Для этого в его конструкции предусмотрены двойной руль, широкие нескользящие педали и эргономичное сиденье с регулировкой по вертикали и по горизонтали.
Система нагрузки у модели магнитная. Маховик весом 7 кг изготовлен на сверхточном оборудовании, поэтому движется плавно, бесшумно и без рывков. 8 уровней нагрузки подойдут как для новичков, так и для опытных спортсменов.
8 уровней нагрузки подойдут как для новичков, так и для опытных спортсменов.
На ЖК-дисплее отображаются самые важные данные о тренировке: время, пройденное расстояние, пульс (измеряется датчиком ЧСС на руле), скорость, расход калорий. Усиленная рама обеспечивает долгую и безотказную работу тренажера, а транспортировочные колеса облегчают его эксплуатацию.
Выбор редакции
HyperFit Reisender U13
Универсальный тренажер
Тренажер для дома «3 в 1» выполняет функции не только эллипсоида, но и степпера с велотренажером
Узнать ценуВсе модели
Основные характеристики
| Максимальный вес пользователя | 110 кг |
| Вес маховика | 7 кг |
| 3 в 1 | эллиптический тренажер, велотренажер и степпер |
| Эргономичное сидение | есть |
| Удобная посадка, снимающая нагрузку на позвоночник | есть |
| Система нагружения | магнитная |
| Педали | широкие с нескользящей текстурой |
| Дисплей | ЖК с показателями физической активности |
| Датчики | кардиодатчики и пульсометр |
Плюсы и минусы
Сверхточный маховик, 8 уровней нагрузки, усиленная рама, наличие двойного руля и эргономичного сидения, информативный ЖК-дисплей
Не обнаружены
Рейтинг топ-10 по версии КП
1.
 Bowflex Max Trainer M3Bowflex Max Trainer M3. Фото: yandex.market.ru
Bowflex Max Trainer M3Bowflex Max Trainer M3. Фото: yandex.market.ruBowflex Max Trainer M3 — это аэромагнитный эллиптический тренажер с передним приводом. Максимально допустимая масса тренирующегося — 136 кг. Вы можете дозировать нагрузку используя восемь уровней сопротивления. Сам тренажер весит 65 кг. Компьютер отслеживает и выводит на дисплей следующие показатели: пульс, время тренировки, пройденную дистанцию, скорость и потраченные калории. Дополнительным бонусом идут две встроенные программы тренировок. Тренажер весьма технологичный — имеется возможность беспроводного подключения смартфона и кардиодатчика. Конструкторы позаботились о максимальном комфорте во время тренировок и добавили следующие элементы: подставка для книг и для стакана. Еще приятным моментом выступают компенсаторы неровности пола. Плюсом, особенно для дома, станет компактность эллипсоида. Гарантия — 2 года.
Плюсы и минусы
Качество, внешний вид, функциональность
2. Horizon Andes 3
Horizon Andes 3. Фото: yandex.market.ru
Фото: yandex.market.ruHorizon Andes 3 — электромагнитный орбитрек с длиной шага 51 см. Модель хорошо подойдет спортсменам с высоким ростом. Маховик весит 7 кг и располагается в передней части. Нагрузка может регулироваться посредством 16 уровней — будет проще подобрать сопротивления исходя из вашей подготовки. Максимальный допустимый вес — 136 кг. Компьютер отслеживает следующие данные: пройденное расстояние, расход калорий, текущая скорость, частота вращения. Стоит отметить, что тренажер также измеряет ваш пульс с помощью кардиодатчика на руле. Всего 10 встроенных программ, одна пользовательская. Тренажер легко складывается, что является однозначным плюсом в домашних условиях. Гарантийный срок распространяется на 1 год.
Плюсы и минусы
Дизайн, система складывания, качество изготовления
Тяжелый (77 кг)
3. Xterra FS4.5E
Xterra FS4.5E. Фото: yandex.market.ruXterra FS4.5E — магнитный эллиптический тренажер с передним приводом и длиной шага 46 см. Маховик весит прилично — 12 кг. Тренажер считает вашу частоту сердечных сокращений (ЧСС) и даст сигнал в случае чрезмерного превышения физический нагрузки. Экран компьютера отображает дистанцию, которую вы преодолели, скорость, расход калорий, а также частоту вращения. Тренажер имеет 20 уровней сопротивления — большой простор для варьирования нагрузки. Также имеется восемь программ для тренировок. К эллипсоиду можно подключить MP3-плеер, что тренироваться под любимую музыку. Гарантия на тренажер — 2 года, на раму — 5 лет.
Тренажер считает вашу частоту сердечных сокращений (ЧСС) и даст сигнал в случае чрезмерного превышения физический нагрузки. Экран компьютера отображает дистанцию, которую вы преодолели, скорость, расход калорий, а также частоту вращения. Тренажер имеет 20 уровней сопротивления — большой простор для варьирования нагрузки. Также имеется восемь программ для тренировок. К эллипсоиду можно подключить MP3-плеер, что тренироваться под любимую музыку. Гарантия на тренажер — 2 года, на раму — 5 лет.
Плюсы и минусы
Габариты, встроенные программы, дизайн
Тяжелый
4. Proxima Veritas Pro
Proxima Veritas Pro. Фото: yandex.market.ruProxima Veritas Pro является моделью электромагнитного орбитрека с задним приводом. Длина шага может варьироваться в пределах 40-51 см. Маховик имеет массу 24 кг, дает хорошую плавность хода. Способен выдерживать человека с максимальным весом 135 кг. Тренажер весьма функционален, отслеживает частоту пульса, измеряет длину шага и выдает сигнал о превышении нагрузки. Крепление кардиодатчика осуществляется на руле. На дисплее отслеживаются данные о пройденном расстоянии, сожженных калориях, скорости и частоте вращения. Предусмотрено 12 различных тренировочных программ: по времени, по расстоянию, пользовательская, программа постоянного пульса, фитнес-оценка. Из ощутимых минусов — занимает достаточно много места. Гарантия продлится 2 года на сам тренажер и 5 лет на раму.
Крепление кардиодатчика осуществляется на руле. На дисплее отслеживаются данные о пройденном расстоянии, сожженных калориях, скорости и частоте вращения. Предусмотрено 12 различных тренировочных программ: по времени, по расстоянию, пользовательская, программа постоянного пульса, фитнес-оценка. Из ощутимых минусов — занимает достаточно много места. Гарантия продлится 2 года на сам тренажер и 5 лет на раму.
Плюсы и минусы
Надежная рама, плавный ход,- Небольшие неточности при измерении пульса регулировка шага
Небольшие неточности при измерении пульса
5. Sportop E7000P
Sportop E7000P. Фото: yandex.market.ruSportop E7000P — эллипсоид с магнитной системой нагрузки. Маховик расположен в задней части тренажера. В зависимости от вашей тренированности можно дозировать сложность путем установки одного из 16 уровней нагрузки. Орбитрек способен выдержать крупного человека с массой 130 кг. Тренажер отслеживает ЧСС тренирующегося, а также на дисплей выводятся показатели расстояния, расхода калорий, скорости и частоты вращений. Имеются программы, учитывающие пульс, а также одна пользовательская. Достаточно объемный тренажер, в квартире будет занимать много места.
Имеются программы, учитывающие пульс, а также одна пользовательская. Достаточно объемный тренажер, в квартире будет занимать много места.
Плюсы и минусы
Качественная сборка, устойчивость, надежный
Габаритный
6. Clear Fit MaxPower X350
Clear Fit MaxPower X350. Фото: yandex.market.ruClear Fit MaxPower X350 — это орбитрек, в основе работы которого лежит электромагнитная система нагрузки. Важным показателем выступает длина шага, в данной модели она равна 51 см. Максимально допустимая масса тренирующегося — 140 кг. Имеется 40 тренировочных программ. Для регулировки уровня нагрузки тренажер оснащен 34 режимами сопротивления. Орбитрек считывает пульс спортсмена, а также измеряет следующие показатели: пройденное расстояние, расход калорий, текущая скорость, частота вращения. Гарантия на данный тренажер действует в течение года.
Плюсы и минусы
Широкий шаг, плавность хода
Колесики для передвижения завышены
7. AMMITY Dream DE 40
AMMITY Dream DE 40. Фото: yandex.market.ru
Фото: yandex.market.ruAMMITY Dream DE 40 — это еще одна модель электромагнитного эллиптического тренажера. Маховик в данном эллипсоиде весит 11,7 кг и располагается спереди. То есть это передний привод, который более удобен для высоких людей, да и длина шага соответствует — 54 см. Компьютер тренажера измеряет пульс во время тренировки, длину шага и выдает предупреждение в случае чрезмерной нагрузки. Также на дисплей выводятся данные о преодоленной дистанции, набранной скорости, сожженных калориях и частоте вращения. Количество тренировочных программ — 76. Тренажер весьма тяжелый — 90,8 кг и достаточно габаритный, поэтому будет не очень удобен для небольшой квартиры. Имеется аудиовход и Bluetooth модуль. Гарантия — 1 год.
Плюсы и минусы
Длина шага, выдерживает высокий вес (160 кг), большое количество программ
Тяжелый, цена
8. SVENSSON BODY LABS ComfortLine ESM
SVENSSON BODY LABS ComfortLine ESM. Фото: yandex.market.ruSVENSSON BODY LABS ComfortLine ESM является магнитным эллипсоидом с задним приводом и достаточно приемлемой ценой. Хороший вариант для дома. Длина шага составляет 42 см. Максимальный вес занимающегося — до 130 кг. Оснащен восемью уровнями нагрузки. Орбитрек отслеживает ЧСС и в случае повышенной нагрузки дает сигнал. На дисплей выводятся стандартные показатели: пройденное расстояние, расход калорий, текущая скорость, частота вращения. Вес тренажера всего 38 кг. Гарантийный срок — 1 год, на раму — 3 года.
Хороший вариант для дома. Длина шага составляет 42 см. Максимальный вес занимающегося — до 130 кг. Оснащен восемью уровнями нагрузки. Орбитрек отслеживает ЧСС и в случае повышенной нагрузки дает сигнал. На дисплей выводятся стандартные показатели: пройденное расстояние, расход калорий, текущая скорость, частота вращения. Вес тренажера всего 38 кг. Гарантийный срок — 1 год, на раму — 3 года.
Плюсы и минусы
Компактный, не шумный, цена
Раз в год лучше смазывать
9. Oxygen Alabama EXT
Oxygen Alabama EXT. Фото: yandex.market.ruOxygen Alabama EXT — еще одна бюджетная модель эллиптического тренажера с магнитной системой нагрузки. Маховик массой 9 кг располагается сзади. Существует мнение, что задний привод дает большую нагрузку на мышцы. Когда речь идет об эллипсоидах, то обязательно для безопасности суставов и комфорта нужно учитывать длину шага. У данной модели она составляет 42 см. Максимальный вес — не более 140 кг. Предусмотрено 8 режимов нагрузки. Дисплей отображает стандартные критерии: пройденное расстояние, расход калорий, текущая скорость, частота вращения. Гарантия — 1 год на элементы износа узлов движения. Если вы ищете орбитрек для дома, то данный тренажер порадует вас своими габаритами.
Гарантия — 1 год на элементы износа узлов движения. Если вы ищете орбитрек для дома, то данный тренажер порадует вас своими габаритами.
Плюсы и минусы
Компактность, бесшумность, цена
Нет программ тренировок
10. Hasttings FS400 Sparta
Hasttings FS400 Sparta. Фото: yandex.market.ruHasttings FS400 Sparta — это модель эллипсоида с магнитной нагрузкой и задним приводом. Масса маховика составляет 22 кг. Оснащен 24 режимами регулировки нагрузки. Длина шага равна 39 см. Имеется возможность изменения угла наклона платформы, что позволит проработать разные группы мышц. Тренажер считывает ваш пульс, также учитываются данные о пройденной дистанции, сожженных калориях, развитая скорость и частота вращения. Орбитрек оснащен разъемом для MP3. Небольшой вес и габариты прекрасно подойдут для домашнего использования. Гарантия — 1 год.
Плюсы и минусы
Прочный, компактный
Огрехи в измерении пульса
Как выбрать эллиптический тренажер
Условно можно разделить тренажеры по сфере их применения:
- Для дома. Часто бывают складными, имеют небольшую массу, достаточно бюджетные.
- Для спортзала. Такие модели дорогие, габаритные, со множество функций, но вместе с тем — долговечны.
- Комбинированный вариант. Крепкий середняк между двумя вышеназванными классами. Не слишком большие, весят не очень много, невысокая стоимость.
 Часто бывают складными, имеют небольшую массу, достаточно бюджетные.
Часто бывают складными, имеют небольшую массу, достаточно бюджетные.Стоит учесть, насколько серьезно вы собираетесь заниматься. Для тренировок 1-2 раза в неделю домашних моделей вполне достаточно. Для более продвинутого уровня, когда тренинг проходит 2-3 раза в неделю, подойдут комбинированные варианты. Если вы занимаетесь дома более 3 раз в неделю, у вас достаточно свободного места и финансовый вопрос не проблема, то можно приобрести и модели профессионального уровня для спортзала.
Эллиптические тренажеры, по принципу работы делятся на следующие виды:
- механические;
- магнитные;
- электромагнитные;
- аэромагнитные.
Механические
Данный вид орбитреков самый бюджетный. Осуществляет свою работу за счет движений пользователя. Наличие регулировки и изменения нагрузки достаточно редко встречается на подобных моделях. Тренировки будут весьма шумными, да и плавность хода не самая лучшая. Однако подобные тренажеры занимают мало места за счет небольших габаритов.
Осуществляет свою работу за счет движений пользователя. Наличие регулировки и изменения нагрузки достаточно редко встречается на подобных моделях. Тренировки будут весьма шумными, да и плавность хода не самая лучшая. Однако подобные тренажеры занимают мало места за счет небольших габаритов.
Магнитные
Магнитные эллиптические тренажеры мало отличаются от механических, за исключением возможности регулировать нагрузку, настраивая магниты. Обычно у подобных моделей бывает 8 уровней нагрузки, но есть и исключения. Обратите внимание на маховик: чем он больше, тем лучше плавность хода. Также имеются датчики сердцебиения и компьютер для настройки программ тренировок.
Электромагнитные
У данного вида тренажеров имеется множество достоинств: плавность хода, бесшумность, функциональность и долговечность. Минус — обязательно подключить к источнику питания. Модели оснащаются практичными компьютерами, способными выполнить множество задач. Не самые большие в плане габаритов, но все же занимают достаточно места.
Аэромагнитные
Самый продвинутый вид эллипсоидов. Все достоинства электромагнитных моделей, но отсутствие их главного минуса — необходимости подключения к сети. Да, генератор, в случае его полной разрядки, необходимо заряжать от сети, но постоянного подключения не требуется. Именно генератор снабжает электропитанием все элементы тренажера. Пожалуй, это самой дорогой по стоимости вид. Но и самый функциональный.
Помимо факторов, описанных выше, еще необходимо учесть тип привода. Существует два типа: передний и задний. В основном эллиптические тренажеры имеют второй вариант. Маховик и трансмиссия располагаются в задней части, из-за чего траектория движений имеет больший уклон вперед, как при беге. Такой тип обеспечивает лучшую устойчивость и большую компактность. Передний привод — это относительно новый подход в конструкции эллипсоидов. Соответственно, маховик и трансмиссия установлены в передней части тренажера. Из-за этого немного меняется траектория движений, спортсмен находится в более вертикальном положении, из-за чего снижается силовая нагрузка на мышцы. Однако для более высоких спортсменов такой тип привода более удобен.
Однако для более высоких спортсменов такой тип привода более удобен.
Но это не весь перечень параметров, которые стоит учесть при выборе эллиптического тренажера. Также проявите внимание к следующем показателям.
Конструкция
Решите, какой тренажер вам необходим — складной или стационарный. Конечно, первый вариант более удобен для дома. Однако второй имеет большую прочность.
Угол наклона педалей
Не все модели имеет подобную функцию. Изменяя угол наклона, вы меняете положение тела, соответственно, получаете разную нагрузку на мышцы. Такой регулировкой вы можете проработать именно те мышцы, которые вам необходимо.
Длина шага
Для людей среднего роста вполне достаточно длины шага в 39-40 см. Если ваш рост от 190 см, то лучше взять длину шага 45-50 см.Также существуют тренажеры с функцией регулировки. Но не стоит покупать тренажер с длиной шага 30-33 см ради их компактности, этот вариант уместен при условии вашего невысокого роста.ЭТО
Максимальный вес пользователя
Обязательно обращайте внимание на этот параметр, берите с небольшим запасом.
Маховик
Вообще считается, что чем тяжелее маховик, тем большую плавность хода вы получите, а также более основательную нагрузку. Со средним весом вполне достаточно маховика с массой 8 кг, а вот крупным людям лучше брать маховик от 15 кг. В электромагнитных моделях вес маховика значения не имеет. Также важно не путать вес маховика и массу вращения.
Функциональность компьютера
Хороший орбитрек должен показывать на своем экране дистанцию, которую вы преодолели, сожженные калории, частоту сердечных сокращений и время, потраченное на тренировку. Более современные тренажеры также имеют программу тренировок, которая может подбираться пользователем, либо автоматически тренажером, исходя из ваших результатов. Но это не столь значительный фактор, скорее бонус.
Перед приобретением, желательно протестировать тренажер. Важно, чтобы вам было комфортно себя чувствовать во время занятия. Изучите все параметры, которыми он оснащен. Обязательно узнайте правила эксплуатации и гарантийный срок. Главное, чтобы после приобретения вы действительно занимались, а не поставили его в угол, либо использовали в качестве вешалки для одежды.
Главное, чтобы после приобретения вы действительно занимались, а не поставили его в угол, либо использовали в качестве вешалки для одежды.
Электроника | Бесплатный полнотекстовый | Простой и новый метод локализации с использованием излучаемых сверхнизкочастотных сигналов электромагнитных волн от надводных и подводных аппаратов
1. Введение
Растущее развитие освоения океана и военных приложений сделало измерения и обнаружение надводных или подводных Физические сигналы транспортных средств значимы. Благодаря более длительной способности передачи ультразвуковой метод широко применяется для обнаружения движущихся целей. Однако современные методы акустической скрытности и суровые условия на мелководье стали серьезным препятствием для методов акустического обнаружения [1,2]. Поскольку электромагнитные сигналы сверхнизкой частоты (0–3 Гц) излучаются движущимися объектами в море, такие сигнатуры уже давно привлекают внимание и изучаются военными и академическими кругами [3]. В прошлом для предотвращения проникновения подводных лодок использовались индуктивные петли, которые устанавливались в охраняемых портах, гаванях и других важных местах [3]. Между тем многочисленные исследования посвящены изучению источников поля подводных целей, таких как подводные лодки, необитаемые подводные аппараты (НПА) и др. [4,5]. С развитием интегрированных технологий производительность электрических/магнитных датчиков была значительно улучшена, что позволило разместить портативный датчик в необходимых местах, где были установлены системы обнаружения магнитных аномалий (MAD), установленные на беспилотных летательных аппаратах (БПЛА). предложено [6]. В ближайшем будущем предполагаемые рои БПЛА с системами MAD сделают их практичными для наблюдения за большим мелководьем и акустически бесшумного обнаружения подводных лодок [7].
В прошлом для предотвращения проникновения подводных лодок использовались индуктивные петли, которые устанавливались в охраняемых портах, гаванях и других важных местах [3]. Между тем многочисленные исследования посвящены изучению источников поля подводных целей, таких как подводные лодки, необитаемые подводные аппараты (НПА) и др. [4,5]. С развитием интегрированных технологий производительность электрических/магнитных датчиков была значительно улучшена, что позволило разместить портативный датчик в необходимых местах, где были установлены системы обнаружения магнитных аномалий (MAD), установленные на беспилотных летательных аппаратах (БПЛА). предложено [6]. В ближайшем будущем предполагаемые рои БПЛА с системами MAD сделают их практичными для наблюдения за большим мелководьем и акустически бесшумного обнаружения подводных лодок [7].
Из-за небольшого размера обычно используются магнитные датчики, что делает развитие технологий магнитного обнаружения стабильным [8]. Кроме того, традиционные строительные материалы транспортных средств, такие как сталь и железо, намагничиваются из-за эффектов намагничивания, если они остаются в среде геомагнитного поля в течение длительного времени, что создает дополнительное магнитное поле. Исследование показывает, что магнитное поле корабля можно аппроксимировать как статическое магнитное поле [9], и это добавит еще одно измерение обнаруживаемым сигналам. Анализируя сигнал магнитного поля, излучаемый транспортными средствами, можно оценить состояние движения цели. Однако следует тщательно выбирать подходящую модель магнитного поля мишени, наиболее распространенной из которых является одиночный магнитный диполь [10] или горизонтальный электрический диполь [11]. Кроме того, другие модели, такие как модель одиночного равномерно намагниченного сфероида (называемая моделью одиночного эллипсоида), модель массива магнитных диполей и гибридная модель модели одиночного эллипсоида и массива диполей (сокращенно гибридная модель) предложена и исследована [12], где модель одного эллипсоида имеет меньше параметров и меньшие требования к количеству информации в точках измерения. Кроме того, многочисленные сфероидальные транспортные средства применялись в реальных условиях эксплуатации [13,14], в то время как Ref.
Исследование показывает, что магнитное поле корабля можно аппроксимировать как статическое магнитное поле [9], и это добавит еще одно измерение обнаруживаемым сигналам. Анализируя сигнал магнитного поля, излучаемый транспортными средствами, можно оценить состояние движения цели. Однако следует тщательно выбирать подходящую модель магнитного поля мишени, наиболее распространенной из которых является одиночный магнитный диполь [10] или горизонтальный электрический диполь [11]. Кроме того, другие модели, такие как модель одиночного равномерно намагниченного сфероида (называемая моделью одиночного эллипсоида), модель массива магнитных диполей и гибридная модель модели одиночного эллипсоида и массива диполей (сокращенно гибридная модель) предложена и исследована [12], где модель одного эллипсоида имеет меньше параметров и меньшие требования к количеству информации в точках измерения. Кроме того, многочисленные сфероидальные транспортные средства применялись в реальных условиях эксплуатации [13,14], в то время как Ref. [15] исследует дизайн, конструкцию и реализацию нового прототипа сферического беспилотного подводного аппарата для операций в замкнутых, подверженных запутыванию морских средах. Применение таких транспортных средств сделало бы акцент на исследованиях модели сфероида. Кроме того, стабильность модели может быть гарантирована даже при отсутствии достаточной эффективной информации в точках измерения. Кроме того, следует отметить, что объекты не могут быть эффективно эквивалентны модели магнитного диполя на близком расстоянии [16]. Таким образом, были проведены многочисленные исследования на модели одиночного эллипсоида. Ссылка [17] сравнили две структурные модели и оценили их эффективность. Кроме того, исх. [18] позже использовали магнитную модель эллиптической сферы с одним вращением для определения местоположения военного корабля. Однако для реализации этих методов необходимо проводить повторяемые измерения в различных точках измерения для достижения требуемой точности, что трудно реализовать в условиях боевых действий.
[15] исследует дизайн, конструкцию и реализацию нового прототипа сферического беспилотного подводного аппарата для операций в замкнутых, подверженных запутыванию морских средах. Применение таких транспортных средств сделало бы акцент на исследованиях модели сфероида. Кроме того, стабильность модели может быть гарантирована даже при отсутствии достаточной эффективной информации в точках измерения. Кроме того, следует отметить, что объекты не могут быть эффективно эквивалентны модели магнитного диполя на близком расстоянии [16]. Таким образом, были проведены многочисленные исследования на модели одиночного эллипсоида. Ссылка [17] сравнили две структурные модели и оценили их эффективность. Кроме того, исх. [18] позже использовали магнитную модель эллиптической сферы с одним вращением для определения местоположения военного корабля. Однако для реализации этих методов необходимо проводить повторяемые измерения в различных точках измерения для достижения требуемой точности, что трудно реализовать в условиях боевых действий. Кроме того, для таких операций потребуются многочисленные датчики для построения сети, что повысит стоимость и вызовет проблемы с синхронизацией и установкой в море. Чтобы добиться высокой скорости определения местоположения, предлагается метод, использующий только один трехосный феррозондовый магнитный датчик, основанный на вытянутой сфероидальной модели здесь, в этой рукописи, которая является основным вкладом нашей работы. Следовательно, это оригинальность. Между тем, предлагается гибридный алгоритм оптимизации, который сочетает в себе как алгоритм муравьиной колонии, так и алгоритм Левенберга-Марквадта. Кроме того, проводятся эксперименты по локализации реального корабля для проверки характеристик локализации модели одиночного эллипсоида в условиях ближнего магнитного поля. В то же время проводится сравнение эллипсоидной модели с дипольной, и результаты показывают, что предложенная модель превосходит традиционную дипольную.
Кроме того, для таких операций потребуются многочисленные датчики для построения сети, что повысит стоимость и вызовет проблемы с синхронизацией и установкой в море. Чтобы добиться высокой скорости определения местоположения, предлагается метод, использующий только один трехосный феррозондовый магнитный датчик, основанный на вытянутой сфероидальной модели здесь, в этой рукописи, которая является основным вкладом нашей работы. Следовательно, это оригинальность. Между тем, предлагается гибридный алгоритм оптимизации, который сочетает в себе как алгоритм муравьиной колонии, так и алгоритм Левенберга-Марквадта. Кроме того, проводятся эксперименты по локализации реального корабля для проверки характеристик локализации модели одиночного эллипсоида в условиях ближнего магнитного поля. В то же время проводится сравнение эллипсоидной модели с дипольной, и результаты показывают, что предложенная модель превосходит традиционную дипольную.
2. Методы
2.
 1. Target Modeling
1. Target ModelingВ общем случае корабль можно приблизительно смоделировать в виде вытянутого сфероида, показанного на рисунке 1 [16]. Большую полуось эллипсоида можно принять за половину длины корабля (L — длина корабля), а малую полуось эллипсоида — за половину ширины корабля (B — длина корабля). максимальная ширина корабля). Система координат устанавливается с центром корабля в качестве начала координат, где направление оси x соответствует продольному направлению, а ось z — вертикальному направлению вниз. Эллипсоид равномерно намагничен по трем координатным направлениям в магнитном поле Земли, и соответствующий ему магнитный момент равен (Mx,My,Mz). Таким образом, магнитное поле, создаваемое в точке измерения P(x,y,z), составляет:
где (ax,ay,az,bx,by,bz,cx,cy,cz) — расчетные коэффициенты магнитных полей эллипсоида, которые являются известными функциями пространственного распределения и рассчитываются следующим образом:
Поместите датчик в точка измерения P и система координат точки измерения также показаны на рисунке 1, где ось z’ направлена вертикально вниз, а угол между осью x’ и курсом цели, т. е. осью x, равен α. Предполагая, что цель движется по прямой линии с постоянной скоростью в направлении x, при этом скорость равна v, а интервал дискретизации равен DT. Предполагается, что скорость цели не меняется при кратковременном прохождении цели. Тогда соотношение между выходным сигналом j датчика (т. е. излучаемыми магнитными полями цели) будет следующим:
е. осью x, равен α. Предполагая, что цель движется по прямой линии с постоянной скоростью в направлении x, при этом скорость равна v, а интервал дискретизации равен DT. Предполагается, что скорость цели не меняется при кратковременном прохождении цели. Тогда соотношение между выходным сигналом j датчика (т. е. излучаемыми магнитными полями цели) будет следующим:
где −π≤α≤π, а для магнитной цели с фиксированным направлением движения α – фиксированное значение.
Когда цель проходит точку приема, датчик делает m выборок, чтобы получить m наборов трехкомпонентных данных. Используя эти m наборов выборочных данных, можно установить линейные уравнения модели:
где F — матрица коэффициентов относительно целевой позиции. M — параметр модели магнитного поля. H — магнитное поле мишени.
M — параметр модели магнитного поля. H — магнитное поле мишени.
Подводя итог, можно сказать, что задачу магнитной локализации корабля можно рассматривать как задачу оптимизации решения следующего нелинейного уравнения без ограничений:
Целевая функция E является нелинейной функцией (x,y,z,α,K), которая приводят к типичной задаче нелинейной оптимизации.
2.2. Гибридный алгоритм локализации
Чтобы решить вышеупомянутую задачу нелинейной оптимизации, можно использовать гибридный алгоритм локализации, который сочетает в себе алгоритм муравьиной колонии и алгоритм Левенберга–Марквардта, в которых сочетаются преимущества глобальной поисковой оптимизации алгоритма муравьиной колонии и локального точного поиска. Способность алгоритма Левенберга-Марквардта может быть использована для достижения лучшей производительности. Для комбинированного алгоритма локализации алгоритм муравьиной колонии используется для получения начального грубого решения, которое будет передано алгоритму Левенберга-Марквардта для получения окончательного оптимального решения.
Алгоритм Левенберга-Марквардта может быть записан как:
где F(x)=vT(x)v(x).
Легко видеть, что когда µk падает до 0, алгоритм становится методом Гаусса-Ньютона.
Алгоритм муравьиной колонии выполняет следующие операции на каждой итерации [19]: группа муравьев перемещается между соседними состояниями задачи синхронно или асинхронно. Они постепенно создают возможное решение проблемы, используя феромон, эвристическую информацию, связанную с каждым состоянием, и правило перехода состояния, выбирающее направление движения; когда каждый муравей строит решение, феромон может обновляться локально; после того, как все муравьи завершили построение решения, феромон глобально обновляется в соответствии с полученным решением. Итерационный процесс продолжается до тех пор, пока не будет выполнено определенное условие остановки.
Структура алгоритма показана в Алгоритме 1. Следует отметить, что алгоритм муравьиной колонии легко застопорится на более позднем этапе операции из-за его неспособности к точному поиску в локальных областях; таким образом, номер итерации и номер муравья должны быть соответствующим образом сокращены, чтобы повысить эффективность.
| Алгоритм 1: Алгоритм гибридной локализации | |
| Требуется: 0052 | |
| Требование: Алгоритм колонии муравья: набор P0 (X0, Y0, Z0), NANT, AANT | |
| 1: Loop | |
| 2: для I = 1, … … … 1, … … 1, … 10051 | |
| 2: для I = 1, … | |
| 3: Loop | |
4: для J = 1, . .., AANT .., AANT | |
| 5: Оравна с обновлением (4), DO | |
| 6: DO | |
| 6: | 5150505505050505050505050505050505050505. 150515055150505150551505051505050505050505051. |
| 7: update Obj=(FM-H)T(FM-H) | |
| 8: END LOOP | |
| 9: Найдите PI, чтобы минимизировать OBJ | |
| Требование: LM алгоритм: установлен P ′, максимальный номер итерационной. = 1, …, NANT, DO | |
| 11: LOOP | |
| 12: Уравнение обновления (8) | |
| 13: Обновление obj = (fm — h) t (fm — H) | |
| 14: до Obj<ϵ | |
| 15: конец петли |
2.
 3. Описание проверочного эксперимента
3. Описание проверочного экспериментаДля проверки предложенного метода был проведен эксперимент на широкой морской акватории вдали от канала в г. Санья, где влияние других объектов практически отсутствует. Глубина экспериментального моря составляет 26 м, а экспериментальный участок имеет длину 2,6 км и ширину 1,1 км. Судно, использованное в эксперименте, — «Хайхун № 1», показанное на рис. 2, имеет длину 54 м и ширину 13,2 м.
Экспериментальное оборудование в основном включает в себя трехосный высокоточный феррозондовый датчик, высокоточный датчик ориентации, модуль хранения данных и аккумуляторную батарею, как показано на рисунке 3. Используется высокоточный датчик ориентации для преобразования данных о магнитном поле, собранных феррозондом, в географическую систему координат при прохождении корабля, а модуль хранения сбора данных записывает данные о магнитном поле и данные об ориентации в реальном времени для последующей обработки.
Поскольку геомагнитное поле можно считать стабильным, погружное оборудование может некоторое время работать для сбора геомагнитного поля. Затем можно получить магнитное поле цели, вычитая геомагнитное поле из записанных данных при прохождении корабля. Схема эксперимента представлена на рис. 4. Из рисунка видно, что корабль будет плыть с постоянной скоростью v по намеченным линиям, а эксперимент будет повторяться на разных расстояниях по траверзу D: 0 м, 10 м, 20 м, 30 м, 40 м и 50 м при скорости 8 узлов. Система GPS используется для записи необходимых данных, чтобы убедиться, что траектория корабля соответствует заданным требованиям, а также является стандартом для нашего алгоритма. Допускается слабый ветер, чтобы убедиться, что цель может двигаться в соответствии с планом, и это также гарантирует, что глубина моря не сильно изменится, поскольку ее можно использовать в качестве эталона для оценки эффективности метода, который будет обсуждаться в разделе 4.
Затем можно получить магнитное поле цели, вычитая геомагнитное поле из записанных данных при прохождении корабля. Схема эксперимента представлена на рис. 4. Из рисунка видно, что корабль будет плыть с постоянной скоростью v по намеченным линиям, а эксперимент будет повторяться на разных расстояниях по траверзу D: 0 м, 10 м, 20 м, 30 м, 40 м и 50 м при скорости 8 узлов. Система GPS используется для записи необходимых данных, чтобы убедиться, что траектория корабля соответствует заданным требованиям, а также является стандартом для нашего алгоритма. Допускается слабый ветер, чтобы убедиться, что цель может двигаться в соответствии с планом, и это также гарантирует, что глубина моря не сильно изменится, поскольку ее можно использовать в качестве эталона для оценки эффективности метода, который будет обсуждаться в разделе 4.
3. Результаты
Поскольку судно движется в направлении х с фиксированной скоростью, показанной на рисунке 4, изменение положения в направлении х должно представлять собой наклонную прямую линию с наклоном скорости движения корабля на оси времени.
Для оценки предлагаемого метода также проводятся различные измерительные линии с разным расстоянием по лучу. Формула расчета относительной погрешности между реальным значением и значением алгоритма расчета выглядит следующим образом:
где Dp — заданное значение, а Dc — расчетное значение.
Результаты локализации в направлении y показаны в таблице 1, а результаты локализации в направлении z показаны в таблице 2. Оба результата согласуются с записанными данными, но есть некоторые расхождения в направлении y . В основном это связано с ошибками измерения системы GPS. Кроме того, можно легко увидеть, что результаты по z-направлению хорошо согласуются, поскольку глубина моря остается неизменной.
4. Обсуждение
Также сравниваются результаты локализации эллипсоидной модели и одиночной дипольной модели на расстоянии по траверзу 30 м, результаты которых представлены на рис. 6. Из рисунка легко увидеть, что модель эллипсоида будет сходиться к заданным значениям, когда модель магнитного диполя все еще имеет большое отклонение. Поскольку реальное значение глубины моря не сильно изменилось бы, результаты локализации направления z для обеих моделей источника проиллюстрированы в таблице 3. Мы видим, что сфероидальная модель источника лучше, чем магнитная, с наибольшей разницей от 1,86 м до 12,01 м соответственно. Соответствующие относительные ошибки из уравнения (9) составляют 6,67% и 31,59%, что подтверждает выдвинутое предположение о том, что модель сфероидного источника лучше, чем модель магнитного диполя при локализации в ближней зоне.
Из рисунка легко увидеть, что модель эллипсоида будет сходиться к заданным значениям, когда модель магнитного диполя все еще имеет большое отклонение. Поскольку реальное значение глубины моря не сильно изменилось бы, результаты локализации направления z для обеих моделей источника проиллюстрированы в таблице 3. Мы видим, что сфероидальная модель источника лучше, чем магнитная, с наибольшей разницей от 1,86 м до 12,01 м соответственно. Соответствующие относительные ошибки из уравнения (9) составляют 6,67% и 31,59%, что подтверждает выдвинутое предположение о том, что модель сфероидного источника лучше, чем модель магнитного диполя при локализации в ближней зоне.
5. Выводы
Новый метод магнитной локализации с использованием только данных одной точки измерения представлен и изучен в статье, где исследуется новый гибридный метод, основанный на полном исследовании модели однородно намагниченного сфероида. Был проведен эксперимент для проверки предложенного метода, и сравнение зарегистрированных данных с расчетными показывает хорошие характеристики предложенной модели эллипсоида со средней ошибкой около 6,67%.![]() В то же время исследование показывает, что модель вытянутого эллипсоида может превзойти традиционную модель диполя, что проложит путь к широкому применению модели эллипсоида в локализации. Кроме того, необходимо провести больше экспериментов с различными типами транспортных средств, чтобы обогатить исследование.
В то же время исследование показывает, что модель вытянутого эллипсоида может превзойти традиционную модель диполя, что проложит путь к широкому применению модели эллипсоида в локализации. Кроме того, необходимо провести больше экспериментов с различными типами транспортных средств, чтобы обогатить исследование.
Вклад авторов
Концептуализация, К.Ю. и Б.Л.; методика, К.Ю. и Б.Л.; программное обеспечение, Д.Л.; валидации, Д.Л., К.Ю. и Б.Л.; формальный анализ, К.Ю.; расследование, К.Ю. и Б.Л.; ресурсы, Б.Л.; курирование данных, DL; написание — подготовка первоначального проекта, Д.Л. и К.Ю.; написание — обзор и редактирование, К.Ю.; визуализации, Д.Л. и К.Ю.; надзор, К.Ю. и Б.Л.; администрация проекта, К.Ю.; приобретение финансирования, К.Ю. и Х.Л. и К.Д. Все авторы прочитали и согласились с опубликованной версией рукописи.
Финансирование
Это исследование финансировалось за счет гранта NFSC № 61

Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Каталожные номера
- Тан, Х.П.; Диамант, Р .; Сих, В.К.; Вальдмейер, М. Обзор методов и проблем подводной локализации. Океан. англ. 2011 , 38, 1663–1676. [Google Scholar] [CrossRef][Зеленая версия]
- Лян Г.Л.; Лин, В .; Ван, Ю. Оценка эффективной скорости звука в мелководном канале и ее применение для подводной акустической локализации. Техническая акустика. Тех. акуст. 2012 , 31, 42–47. [Google Scholar]
- Холмс, Дж.Дж. Использование сигнатур магнитного поля корабля. Синтез. Лект. вычисл. Электромагн. 2006 , 1, 1–78. [Google Scholar] [CrossRef][Green Version]
- King, R.W.P. Боковые электромагнитные волны от горизонтальной антенны для дистанционного зондирования океана. IEEE транс. Антенны Распространение. 1989 , 37, 1250–1255. [Google Scholar] [CrossRef]
- Тайрон, Р. Страна Персидского залива готова возглавить регион по производству беспилотных летательных аппаратов. Сканд. Дж. Ревматол. 2005 , 35, 44–47. [Google Scholar]
- Холмс, Дж.Дж. Уменьшение сигнатур магнитного поля корабля. Синтез. Лект. вычисл. Электромагн. 2006 , 1, 1–78. [Google Scholar] [CrossRef][Green Version]
- Гао, X. Исследование локализации источника переменного магнитного диполя в геомагнитной среде. Кандидат наук. Диссертация, Северо-Западный политехнический университет, Сиань, Китай, 2018. [Google Scholar]
- Ye, P.; Гонг, С. Область физики корабля; Ordnance Industry Press: Beijing, China, 1992. [Google Scholar]
- Gao, X.; Ян, С .; Ли, Б. Исследование гибридного алгоритма локализации подвижной магнитной цели с помощью одного феррозонда. Дж. Даляньский унив. Технол. 2016 , 56, 292–298. [Google Scholar]
- Jinhong, W.; Бин, Л.; Ляньпин, К.; Ли, Л. Новый метод обнаружения подводных движущихся целей путем измерения их сверхнизкочастотного излучения с помощью индуктивных датчиков. Датчики 2017 , 17, 1734. [Google Scholar]
- Qu, X.; Ян, Р .; Шан, З. Анализ и сравнение метода моделирования магнитного поля подводной лодки. Корабельная наука. Технол. 2011 , 33, 7–11. [Google Scholar]
- Милошевич З.; Фернандес, РАН; Домингес, С.; Росси, К. Руководство для автономных подводных аппаратов в замкнутых полуструктурированных средах. Датчики 2020 , 20, 7237. [Google Scholar] [CrossRef] [PubMed]
- Sands, T. Разработка детерминированного искусственного интеллекта для беспилотных подводных аппаратов (UUV). мар. англ. 2020 , 8, 578. [Google Scholar] [CrossRef]
- Элдред Р.; Люссье, Дж.; Поллман, А. Проектирование и испытания сферического автономного подводного аппарата для исследования внутренней части затонувшего корабля. мар. англ. 2021 , 9, 320. [Google Scholar] [CrossRef]
- Holmes, J.J. Моделирование ферромагнитных сигнатур корабля. Синтез. Лект. вычисл. Электромагн. 2006 , 1, 1–78. [Google Scholar] [CrossRef][Green Version]
- Li, H.; Ли, В.; Лю, Дж. Сравнение двух моделей магнитного поля военного корабля. Дж. Обнаружить. Контроль. 2007 , С1, 62–66. [Google Scholar]
- Биан, X.; Ли, В.; Ли, Х. Исследование методов магнитной локализации военного корабля в реальном времени. Дж. Обнаружить. Контроль. 2006 , 28, 3538. [Google Scholar]
- Васкес, К.Р. Оптимизация муравьиной колонии. Жене. Программа. Эволюционная мах. 2005 , 6, 459–460. [Google Scholar] [CrossRef]
 «> Sun, F.; Хуанг, Ю .; Ву, Л.-Х. Непрерывная подводная локализация на основе магнитной дипольной цели с использованием тензора магнитного градиента и глубины осадки. IEEE GeoSci. Письмо о дистанционных датчиках. 2013 , 11, 178–180. [Google Scholar]
«> Sun, F.; Хуанг, Ю .; Ву, Л.-Х. Непрерывная подводная локализация на основе магнитной дипольной цели с использованием тензора магнитного градиента и глубины осадки. IEEE GeoSci. Письмо о дистанционных датчиках. 2013 , 11, 178–180. [Google Scholar] [Google Scholar]
[Google Scholar] мар. англ. 2020 , 8, 578. [Google Scholar] [CrossRef]
мар. англ. 2020 , 8, 578. [Google Scholar] [CrossRef] 2005 , 6, 459–460. [Google Scholar] [CrossRef]
2005 , 6, 459–460. [Google Scholar] [CrossRef]Рисунок 1. Схема модели однородно намагниченного сфероида транспортного средства.
Рисунок 1. Схема модели однородно намагниченного сфероида транспортного средства.
Рисунок 2. Фото экспериментального корабля.
Рисунок 2. Фото экспериментального корабля.
Рисунок 3. Фотография экспериментальной установки с одним трехосным феррозондовым магнитным датчиком.
Рисунок 3. Фотография экспериментальной установки с одним трехосным феррозондовым магнитным датчиком.
Рисунок 4. Схема экспериментальной линии съемки (вид сверху).
Рисунок 4. Схема экспериментальной линии съемки (вид сверху).
Рисунок 5. Принимаемые сигналы и место выхода при расстоянии по траверзу D 10 м.
Рисунок 5. Принимаемые сигналы и место выхода при расстоянии по траверзу D 10 м.
Рисунок 6. Сравнение модели сфероида с моделью магнитного диполя с зарегистрированным значением GPS при расстоянии по лучу 30 м. «GPS» представляет записанное значение GPS. «Дипольная модель» представляет собой расчетные результаты дипольной модели. «Эллипсоид» представляет результаты расчетов модели эллипсоида.
Сравнение модели сфероида с моделью магнитного диполя с зарегистрированным значением GPS при расстоянии по лучу 30 м. «GPS» представляет записанное значение GPS. «Дипольная модель» представляет собой расчетные результаты дипольной модели. «Эллипсоид» представляет результаты расчетов модели эллипсоида.
Рисунок 6. Сравнение модели сфероида с моделью магнитного диполя с зарегистрированным значением GPS при расстоянии по лучу 30 м. «GPS» представляет записанное значение GPS. «Дипольная модель» представляет собой расчетные результаты дипольной модели. «Эллипсоид» представляет результаты расчетов модели эллипсоида.
Таблица 1. Результаты локализации в направлении Y для различных расстояний по лучам.
Таблица 1. Результаты локализации в направлении Y для различных расстояний по лучам.
| D [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| preset value [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| calculated value [m] | 0. 462 462 | 12.52 | 23.5 | 32.86 | 35.66 | 46.1 |
| error value | 20.13% | 14.89% | 8.7% | 12.17% | 8,46% |
Таблица 2. Результаты локализации в направлении z для различных расстояний по лучам.
Таблица 2. Результаты локализации в направлении z для различных расстояний по лучам.
| D [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| preset value [m] | 26 | 26 | 26 | 26 | 26 | 26 |
| calculated value [m] | 26. 86 86 | 25.2 | 25.96 | 26.02 | 26.55 | 25.7 |
| error value | 3.22% | 3.08% | 10,15% | 0,07% | 2,07% | 1,17% |
Сравнение результатов локализации в направлении z между моделью магнитного диполя и моделью эллипсоида для разного расстояния по лучам (глубина моря составляет 26 м).
Таблица 3. Сравнение результатов локализации в направлении z между моделью магнитного диполя и моделью эллипсоида для разного расстояния по лучам (глубина моря составляет 26 м).
| Distance Abeam D [m] | Ideal Results | Ellipsoid Model | Dipole Model |
|---|---|---|---|
| z [m] | |||
| 0 | 27.86 (6.67%) | 38.01 ( 31.59%) | |
| 10 | 25.2 (3.17%) | 33.6 (22.62%) | |
| 20 | 26 | 25.96 (0.15%) | 32. 89 (20.95%) 89 (20.95%) |
| 30 | 26.02 (0.08%) | 31.84 (18.34%) | |
| 40 | 26.55 (2.07%) | 30.49 (14.73%) | |
| 50 | 25.7 (1.17% ) | 27,9 (6,81%) | |
Примечание издателя: MDPI остается нейтральным в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности. |
© 2021 авторами. Лицензиат MDPI, Базель, Швейцария. Эта статья находится в открытом доступе и распространяется на условиях лицензии Creative Commons Attribution (CC BY) (http://creativecommons.
 org/licenses/by/4.0/).
org/licenses/by/4.0/).Wolfram|Alpha Примеры: электричество и магнетизм
О-о! Wolfram|Alpha не работает без JavaScript.
Пожалуйста, включите JavaScript. Если вы не знаете, как это сделать, вы можете найти инструкции здесь. Как только вы это сделаете, обновите эту страницу, чтобы начать использовать Wolfram|Alpha.
Примеры для
Электричество и магнетизм охватывают явления, порожденные электромагнетизмом, одной из четырех фундаментальных сил Вселенной. Используйте Wolfram|Alpha, чтобы исследовать богатое разнообразие электромагнитных взаимодействий, возникающих из-за электрических и магнитных полей. Вычислите силы, действующие в статических и динамических полях. Исследуйте, как электричество ведет себя в цепи. Изучить свойства электромагнитного излучения.
Электростатика Вычислите напряженность и силу электрического поля и изучите уравнения электрического поля для множества различных распределений заряда.
Вычислите закон Кулона:
Закон Кулона 2,0 мКл, 5,0 мКл, 250 смВычислите электрический потенциал и напряженность поля:
радиус заряженной сферы = 12 см, заряд = 5,5 мКлНайдите уравнения, связанные с распределением заряда:
заряженный дискэлектрический заряд плотность заряженного эллипсоидаБольше примеровЭлектромагнетизмИзучить электрические поля и электрические потенциалы различных физических систем.
Найдите информацию о движущемся заряде:
потенциал Лиенара-ВихертаВычислите электрический потенциал, зависящий от времени:
распределение заряда, зависящее от времени: электрический потенциалДругие примерыЭлектромагнитное излучениеИзучите свойства электромагнитного спектра и электромагнитных явлений, таких как Ларморовское излучение и видимое излучение цвета.
Вычислить ларморову частоту:
Ларморову частоту электронВычислить гиромагнитное отношение:
формулу гиромагнитного отношения протонВычислите цвет видимого света, соответствующий частоте:
700 ТГц светВычислите коэффициент затухания радиоволн в воздухе:
поглощение электромагнитных волн при 30°C и влажности 20%Другие примерыЭлектромагнитные измерения Изучите физические величины, используемые в области электричество и магнетизм и как они измеряются.
Узнайте, как измерять различные физические свойства:
Какие приборы измеряют ток?Вычисление безразмерной электродинамической величины:
магнитное число Рейнольдса скорость = 10 м/с, длина = 1 мВычислить безразмерные комбинации:
заряд, емкость, напряжение, токПолучить информацию о физической величине:
магнитное сопротивлениеБольше примеровМагнитостатикаВычислить магнитные поля для и их влияние на разные объекты.
Расчет плотности магнитного потока для объекта:
Катушка Гельмгольца 1 м 1 АРасчет силы на пару проводов:
сила на двух длинных проводах с токомНайти уравнения, связанные с намагниченным объектом:
намагниченный шарикНайдите осевую напряженность поля идеального соленоида:
осевое поле идеального соленоида с током 2 ампераДругие примерыЭлектрические цепиВычислите свойства различных элементов схемы, включая диоды и фильтры, а также их комбинации.
Используйте поля ввода для указания данных для расчета закона Ома:
Калькулятор закона ОмаАнализ RLC-цепи:
RLC-цепь 10 Ом, 12Гн, 400 мкФРасчет мощности, потребляемой электрическим компонентом:
электрическая мощность 1,5 В, 3 AБольше примеров Волноводы Вычислите допустимые частоты, их скорости и внешний вид волны при прохождении через различные волноводы.
Изучение свойств идеальных волноводов:
круглый волноводИзучение свойств конкретных мод:
поперечных электрических волн в круглом волноводе для m=1, n=1Изучить физические константы, имеющие отношение к электричеству и магнетизму.
Get the value of a physical constant:
permeability of vacuummagnetic flux quantumSchwinger electric field strengthMore examplesRELATED EXAMPLES
RELATED WOLFRAM РЕСУРСЫ
Расчет характеристик электрических машин, таких как двигатели, трансформаторы и системы передачи энергии.
Вычисление характеристик двигателя:
синхронный двигатель, 6 полюсовВычисление характеристик трансформатора:
трансформатор 110 В, 60 Гц Дополнительные примерыРезерфордское рассеяние
Рассчитайте сечение рассеяния для резерфордовского рассеяния из-за электромагнитных взаимодействий.