Манипулятор (механизм) | это… Что такое Манипулятор (механизм)?
У этого термина существуют и другие значения, см. Манипулятор.
Робот-манипулятор работает вблизи печи.
Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности.
Устройство и применение
Основу манипуляторов составляют пространственные механизмы со многими степенями свободы. Манипуляторы выполняют работы в средах, недоступных или опасных для человека (подводные глубины, вакуум, радиоактивная среда и другие агрессивные среды), вспомогательные работы в промышленном производстве. Манипуляторы используются в медицинской технике (например, в протезировании). Манипуляторы изучает теория манипуляторов, которая является разделом теории машин и механизмов. В узком смысле манипулятором называется механическая рука.
В узком смысле манипулятором называется механическая рука.
Манипуляторы делятся на управляемые человеком и автоматические манипуляторы (роботы-манипуляторы как разновидность роботов). Развитие манипуляторов привело к созданию промышленных роботов. Проектирование механизмов-манипуляторов требует решения таких задач, как создание манёвренности, устойчивости в работе, выбор правильного соотношения полезных и холостых ходов. Иногда требуется проектирование таких систем, в которых оператор чувствует усилие, создаваемое на рабочем органе или на грузозахвате.
Виды
- Манипулятор (в горном деле) — основной механизм буровой каретки, предназначенный для перемещения в призабойном пространстве автоподатчика с перфоратором (бурильной машиной).
- Манипулятор (в металлургии) — машина для выполнения вспомогательных операций, связанных с изменением положения заготовки при обработке металлов давлением. Различаются прокатный и ковочный манипулятор. В кузнечных и прокатных цехах используются подвесные и напольные манипуляторы, которые являются разновидностью кантователей (механизмов для переворачивания (кантовки) изделий).

- Манипулятор (в ядерной технике) — приспособление для работы с радиоактивными веществами, исключающее непосредственный контакт человека с этими веществами.
- Манипуляторами оснащаются гидростаты для ведения океанографических и других работ на глубинах.
- Платформа Гью — Стюарта — разновидность параллельного манипулятора, в которой используется октаэдральная компоновка стоек. Имеет шесть степеней свободы. Применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах и в ортопедической хирургии.
- Кран-манипулятор — мобильная грузоподъёмная машина, включающая грузоподъёмный кран стрелового типа, смонтированный на автомобильном шасси и служащий для его загрузки и разгрузки [1].

Примечания
- ↑ Кран-манипулятор. Cловарь по естественным наукам. Глоссарий.ру.
Робот-манипулятор — что это такое и в каких сферах используется
Робот-манипулятор — тип промышленных роботов. Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения.
Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения.
Роботы могут распознавать, понимать и менять окружающую среду. Их сфера деятельности каждый год расширяется. Внедряются новые программы, роботы могут выполнять всё более точные действия: собирать автомобили, сортировать мусор, выбирать только спелые плоды при сборе урожая.
Сегодня расскажем о том, где и как применяются манипуляторы.
Обзор применения
В зависимости от специфики, манипуляторы используются в разных отраслях промышленности и выполняют разные задачи. Но все они призваны улучшить условия труда работников и снизить расходы предприятия.
Роботы-манипуляторы — решение для тех сфер, в которых часто случаются ошибки из-за человеческого фактора. Там, где человеку не хватает скорости реакции или существуют опасные условия, приходит на помощь робот.
Автомобильная промышленность
Использование роботов-манипуляторов в этой сфере позволяет выполнять одновременно несколько задач быстро и точно.
Их используют для литья, штамповки, сварки, переноса грузов, установки деталей, сборки кузова и других работ. Роботы-манипуляторы в машиностроении обеспечивают беспрерывное производство.
Электротехника, электроника
В сфере электроники важна точность, скорость, умение работать с мельчайшими деталями. Рука робота-манипулятора не дрогнет и выполнит задачу быстрее, чем это сделали бы люди.
Сравните работу робота и человека в видео, в котором робот собирает жесткий диск:
Строительство
В этой отрасли роботы-манипуляторы помогают строить здания, ориентируясь на информационную модель. Это помогает избежать ошибок установки, ускорить процесс строительства, уменьшить количество отходов.
К тому же с помощью манипуляторов можно строить сложные геометрические формы.
Химическая промышленность
Это сфера контакта с опасными веществами. Внедрение роботов-манипуляторов в химическую промышленность минимизирует участие людей в процессах производства.
Внедрение роботов-манипуляторов в химическую промышленность минимизирует участие людей в процессах производства.
В сферах, где присутствие человека обязательно, используются специальные коллаборативные роботы, которые взаимодействуют с работниками.
Медицина и фармацевтика
Здесь тоже используются коллаборативные роботы-манипуляторы, которые помогают врачам проводить сложные операции. Такие манипуляторы обычно сверхчувствительные, имеют биосовместимое покрытие.
Также часто используются манипуляторы для создания и упаковки фармацевтических препаратов и мединструментов.
Иные области
Роботы-манипуляторы используются и в других отраслях. Их можно запрограммировать практически на любой ручной труд.
Автоматизация производства с помощью роботов-манипуляторов позволит предприятиям увеличить скорость работы, снизить расходы и повысить рентабельность.
Если вы уже сделали выбор в пользу автоматизации и ищете оборудование для роботов, мы с радостью проконсультируем вас.
Что такое роботы-манипуляторы? Обзор типов и приложений
Роботы регулярно используются для перемещения объекта из одного места в другое. Это может быть перемещение тяжелой экструзии из одной области производственного цеха в другую или деликатная операция на человеческом глазу.
Робот-манипулятор или робот-манипулятор является важным устройством в подобных задачах. Используемые для манипулирования материалами и объектами без непосредственного прикосновения человека, манипуляторы могут быть быстрее и точнее, чем люди-операторы, и иногда могут поднимать гораздо более тяжелые веса. Из-за этих важных преимуществ манипуляторы имеют широкий спектр типов и приложений.
В этой статье объясняются основы роботов-манипуляторов: что это такое, как они работают, их различные варианты и некоторые из наиболее полезных приложений в реальном мире.
В области робототехники манипуляторы представляют собой электронные устройства, предназначенные для взаимодействия с окружающей средой путем перемещения объектов из одного места в другое.
Манипуляторы обычно можно считать синонимами роботизированных рук; «манипуляция» описывает задачу, которую выполняют эти устройства, а «роботизированная рука» описывает их структуру, которая может (хотя и не всегда) напоминать человеческую руку. Роботизированная рука содержит различные сегменты, которые взаимодействуют друг с другом посредством скольжения или шарниров, что дает руке несколько степеней свободы (DoF). На крайнем конце руки (кисти, как ее иногда называют) находится концевой эффектор, такой как захват, который отвечает за непосредственное манипулирование объектом.
Манипуляторы могут быть автоматизированы — как в случае со многими задачами на заводе — или управляться оператором, например, во время операций с замочной скважиной в больнице или для подъема груза на складе. Известные роботы-манипуляторы, такие как производства Kuka и ABB, можно считать типами манипуляторов.
Поскольку манипуляторы состоят из нескольких секций, каждая из которых может двигаться по-своему, для управления общим движением руки используются сложные алгоритмы.
Прежде чем мы начнем рассматривать применение манипуляторов, мы классифицируем их по способу кинематической работы.
Руки роботов-манипуляторов обычно имеют от трех до шести степеней свободы, обеспечиваемых рядом суставов (аналогично плечевому, локтевому или запястному), которые соединяют различные звенья устройства (аналогично плечу, предплечью или ладонь). Соединения манипулятора обычно представляют собой вращательные или призматические соединения.[1]
Вращательное соединение (поворотное соединение): вращение вокруг одной оси, т. е. скручивающее движение
Призматическое соединение (линейное соединение): поступательное движение вокруг одной оси, т. е. движение разгибания
Цилиндрический шарнир: вращение и поступательное движение вокруг одной оси
Сферический шарнир (шаровой шарнир): три степени вращения
Тип рычага определяет его число степеней свободы, а также рабочее пространство (насколько далеко оно может простираться).
Различные конфигурации манипуляторов роботов
Робот с шарнирными руками
Шарнирные роботы с шарнирными руками предлагают максимально возможные степени свободы и обычно имеют от трех до шести шарнирных соединений. Самым большим преимуществом робота с шарнирной рукой является его широкий диапазон движений; однако он может быть менее точным, чем другие типы. Общие области применения включают дуговую сварку и окраску распылением.
Робот SCARA
Манипуляторы робота-манипулятора с селективным соответствием (SCARA) имеют один призматический шарнир для перемещения по оси Z и два параллельных вращательных шарнира. Роботы SCARA широко используются при сборке. Они часто могут поднимать более тяжелые грузы, чем другие типы роботов, поскольку два вращающихся шарнира не поднимают.
Декартовский (портальный) робот
Декартовы или портальные манипуляторы могут перемещаться по трем осям по системе рельсов, подобно печатающей головке 3D-принтера для моделирования наплавленным методом (FDM). Их очень легко программировать, и они могут поднимать тяжелые грузы. Обычное использование включает в себя самовывоз и нанесение герметика.
Их очень легко программировать, и они могут поднимать тяжелые грузы. Обычное использование включает в себя самовывоз и нанесение герметика.
Сферический (полярный) робот
Сферические или полярные роботы-манипуляторы имеют два вращающихся шарнира, в том числе один в основании, и третий призматический шарнир, позволяющий выдвигать руку. Эти манипуляторы требуют менее сложных алгоритмов и полезны для операций сварки и захвата.
Цилиндрический робот
Цилиндрические роботы-манипуляторы имеют вращающееся соединение в основании и два призматических соединения: одно для перемещения по оси Z и одно для перемещения по горизонтальной плоскости. Эта роботизированная система жесткая и точная, но встречается реже, чем другие типы.
Дельта-робот (параллельный)
Дельта-роботы обычно крепятся к потолку рабочей зоны и имеют три или шесть рук, каждая со своим вращающимся или призматическим шарниром.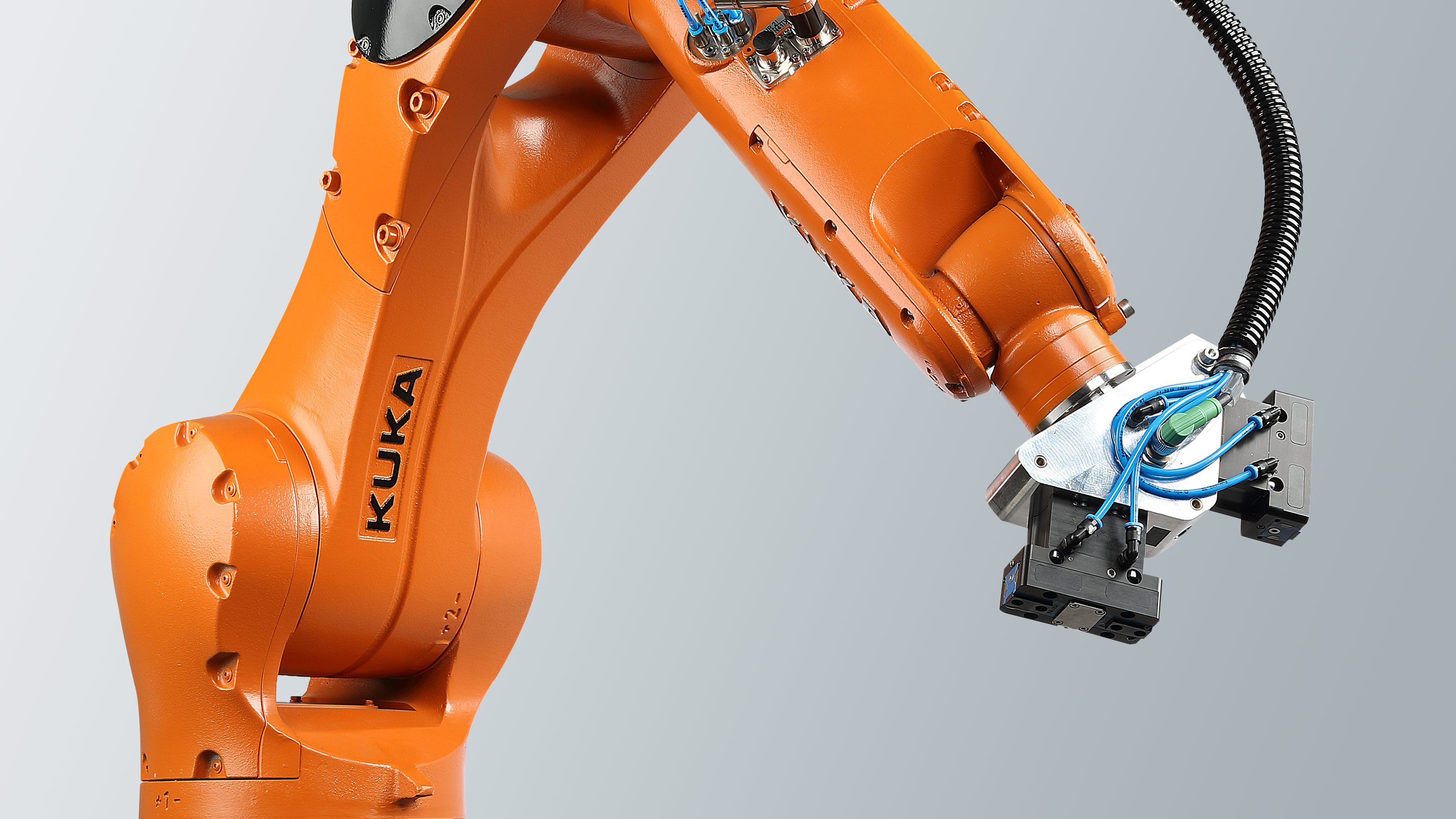 Жесткие и быстродействующие дельта-роботы-манипуляторы используются для таких задач, как захват и установка, сборка и нанесение герметика.
Жесткие и быстродействующие дельта-роботы-манипуляторы используются для таких задач, как захват и установка, сборка и нанесение герметика.
Мы также можем классифицировать манипуляторы по их концевым эффекторам, инструментам на концах рук, которые в конечном итоге определяют, какую операцию может выполнять манипулятор. Концевые эффекторы манипулятора обычно представляют собой некую форму захвата, при этом количество и материал «пальцев» зависят от конечного использования устройства.
Робот-манипулятор с концевыми эффекторами на присосках
Электрические захваты
Электрические захваты имеют пальцы, приводимые в действие отдельными двигателями, что позволяет надежно захватывать объекты, с которыми манипулируют, и высокий уровень контроля над скоростью и размещением.
Пневматический захват
Пневматические захваты используют для движения сжатый воздух, а не электрическую систему, что обеспечивает большее усилие захвата, чем электрические захваты.
Магнитный захват
Магнитные захваты используются для перемещения черных металлов. Магнитность сводит к минимуму риск падения и не требует электричества или воздуха.
Механический захват
Механические захваты не питаются, но имеют штыри или другие конструктивные особенности, которые позволяют им соединяться с объектами, которыми манипулируют.
Присоска
Захваты с присоской используют вакуум для захвата предметов и манипулирования ими. Они представляют собой полезный недорогой вариант, но имеют более ограниченное применение, чем другие типы концевых эффекторов.
Роботы-манипуляторы чаще всего используются на промышленных предприятиях. В связи с этим возможности их использования многочисленны и разнообразны. Однако манипуляторов можно найти и за пределами производства, в таких областях, как здравоохранение.
Промышленность
Роботы-манипуляторы широко используются в промышленных условиях благодаря их точности, воспроизводимости, возможностям автоматизации, способности поднимать тяжелые грузы и универсальности с точки зрения различных концевых эффекторов, которые можно использовать. Таких промышленных роботов иногда называют серийными манипуляторами.
Таких промышленных роботов иногда называют серийными манипуляторами.
Промышленное использование роботов-манипуляторов включает:
Сборка: когда манипулятор используется для добавления различных компонентов в сложную деталь путем прикрепления каждого компонента в правильном месте
- переместить объект из одной области в другую, например. с рабочего стола на поддон
Упаковка: когда манипулятор используется для помещения объекта в коробку, поддон или другую форму упаковки перед, в некоторых случаях, запечатыванием упаковки
Контроль качества: манипуляторы могут использоваться для стресс-тестирования определенных деталей, например, путем их вытягивания или скручивания
Человек- управляемые телеманипуляторы играют важную роль в здравоохранении
Управление роботом может помочь во многих хирургических операциях.
Роботизированная хирургия может быть более точной и, следовательно, привести к лучшим результатам для пациентов, чем ручная хирургия.В большинстве роботизированных операций используются телеманипуляторы, роботизированные манипуляторы, которые позволяют хирургу-человеку управлять рукой и концевым эффектором манипулятора, используя собственные движения рук. Другие роботизированные операции полностью контролируются компьютером, без использования телеманипулятора.
Одним из наиболее ярких примеров роботов-манипуляторов в здравоохранении является хирургическая система Да Винчи, которая используется для хирургических процедур, таких как простатэктомия, гистерэктомия и восстановление сердечного клапана. Система, управляемая с помощью консоли, имеет концевые эффекторы, которые могут функционировать как скальпели, ножницы, электрохирургические устройства или захваты. Одним из ограничений конструкции является отсутствие тактильной обратной связи для оператора.
[2]Космос
Некоторые из наиболее заметных (и дорогостоящих) применений роботов-манипуляторов можно найти в космосе, где имеется ограниченное количество людей-операторов, способных выполнять техническое обслуживание и другие потенциально опасные задачи.
Одним из примеров космического манипулятора является Canadarm. Огромный манипулятор Canadarm весом 450 кг был разработан для манипулирования полезными нагрузками на космических челноках НАСА. Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами.
Рекомендуем прочитать: Рука лунного вездехода расширяет функциональные возможности космических миссий
Роботизированные манипуляторы являются одними из наиболее важных устройств в современном производстве, и их использование позволяет создавать эффективные автоматизированные сборочные линии в таких областях, как автомобилестроение, судостроение и производство потребительских товаров.
товары. Однако они также используются в других областях, и их использование в будущем будет только увеличиваться благодаря их точности, эффективности и способности достигать труднодоступных мест.Важнейшей отличительной чертой манипулятора является кинематическое движение его руки, другими словами, конструкция его различных звеньев и шарниров. Тип руки во многом определяет пригодность манипулятора для решения той или иной задачи (поскольку концевые эффекторы более универсальны и взаимозаменяемы). Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.
[1] Льюис, Ф.Л., Доусон, Д.М., Абдалла, Коннектикут. Управление роботом-манипулятором: теория и практика. КПР Пресс; 2003 12 декабря
[2] Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A. Технический обзор хирургического телеманипулятора да Винчи. Международный журнал медицинской робототехники и компьютерной хирургии.
2013 г., декабрь 9(4):396-406.5 Признаков языка тела манипулятора
Манипуляторы бывают разных форм, размеров и видов. Кроме того, не все те, кто манипулирует, по своей природе злы. Многие люди не осознают, что манипулируют другими. В тот или иной момент и вы, и я использовали свое влияние для достижения личного желания — это основная человеческая природа.
Однако некоторые намеренно манипулируют другими. Они стремятся понизить самооценку другого человека и причинить вред. Они могут говорить и делать добрые дела, когда за ними наблюдают «правильные» люди, но в конечном счете они стремятся к собственному успеху и удовлетворению. Именно этим типам манипуляторов я посвятил большую часть своей карьеры выявлению.
За время работы в высших правительственных учреждениях я многое узнал о том, как распознавать манипуляторов. Моя работа заключалась в том, чтобы подружиться с людьми, чтобы собрать человеческий разум. Я участвовал в этих мероприятиях более десяти лет и многому научился за эти годы.
Навыки, которые я приобрел за это время, помогли мне буквально выжить.В конце концов, я захотел использовать эти навыки и изменить мир к лучшему. Сегодня я достиг этого, обучая других общению. Одна из распространенных тем, по которой я обучал других, включает в себя определение манипуляции с помощью языка тела.
Связанный: Метод «треугольника» этого эксперта по языку тела поможет вам поймать лжеца на месте преступления
Манипуляции и язык тела
Касательно этой темы я слышал множество мифов. Во многих книгах утверждается, что точно определены движения всех манипуляторов. Некоторые люди утверждают, что кто-то всегда лжет, если смотрит налево. Или другой человек может заявить, что манипуляторы определенным образом трут нос. Это не совсем правда.
Жесткая и простая правда заключается в том, что использование языка тела для выявления манипуляций требует времени и изучения. Чтобы по-настоящему распознать чей-то обман, вы должны иметь полное знание базового — или стандартного — языка тела человека.
Любые отклонения от нормы говорят о том, что что-то не так.По этим причинам вам всегда будет легче обнаружить манипуляцию, когда она исходит от кого-то из ваших близких. Вы привыкли к естественному языку тела любимого человека и вам будет легче распознавать любые отклонения, сознательные или подсознательные.
Помните, что если человек смотрит налево или трет нос, это может быть признаком манипуляции. Однако это применимо только в том случае, если эти жесты не являются обычными для этого человека.
Связанный: 9 Признаков того, что вы имеете дело с эмоциональным манипулятором
Признаки манипулятора
Как только вы полностью поймете типичный язык тела и жесты человека, вы сможете начать обнаруживать отклонения в его поведении. Эти отклонения от нормы могут иногда отражать признаки манипуляции. Ниже приведены примеры некоторых стандартных отклонений, которые я наблюдал у манипуляторов:
1. Постукивание ногой
Когда кто-то постукивает ногой, это часто является признаком раздражения или нетерпения.
Манипулятор может постучать ногой или начать щелкать ручкой, чтобы намеренно передать эти эмоции и вызвать у жертвы чувство вины. Постукивание ногами также может заставить вас поторопиться с решением, что может сыграть на руку манипулятору.Когда манипулятор чешет подбородок, он пытается показать неуверенность или низкую уверенность. Часто это тактика, используемая для того, чтобы заставить людей сдаться и сказать: «Все в порядке. Я просто могу это сделать».
Я уверен, вы можете вспомнить много раз, когда вы говорили кому-то, что хотите сделать что-то, чего не делали, потому что они казались неуверенными в своих силах. Однако, если вы уверены, что человек способен сделать то, о чем он вас просит, и он все еще чешет подбородок, скорее всего, он пытается манипулировать вами, чтобы вы сделали это за него.
3. Растирание рук и шеи
Представьте своего любимого диснеевского злодея. Вы можете легко представить, как они потирают руки и маниакально смеются.
Даже Дисней понимает, что такое поведение является признаком корыстного заговора. Хотя у реальных манипуляторов может и не быть злобного смеха, потирание рук может быть их способом сообщить о доминировании, раздражении или спешке.
Многие люди, испытывающие стресс, также потирают шею. Манипулятор может проявлять признаки стресса или вины при эксплуатации другого человека. Только опытные социопаты находят полное удовольствие в том, чтобы обмануть свою цель. Если вы обнаружите, что растирание шеи — это необычное действие со стороны конкретного человека, это может заслуживать беспокойства.
4. Зрительный контакт и движение
Принято считать, что если кто-то смотрит вам прямо в глаза, он говорит вам правду. Однако манипуляторы могут долго удерживать зрительный контакт. На самом деле манипулятор или лжец пристально наблюдает за своей жертвой и постоянно смотрит ей в глаза, чтобы определить, попадается ли жертва на их уловку. Если кто-то смотрит вам прямо в глаза и обычно этого не делает, он может лгать.
 Роботизированная хирургия может быть более точной и, следовательно, привести к лучшим результатам для пациентов, чем ручная хирургия.
Роботизированная хирургия может быть более точной и, следовательно, привести к лучшим результатам для пациентов, чем ручная хирургия. [2]
[2] товары. Однако они также используются в других областях, и их использование в будущем будет только увеличиваться благодаря их точности, эффективности и способности достигать труднодоступных мест.
товары. Однако они также используются в других областях, и их использование в будущем будет только увеличиваться благодаря их точности, эффективности и способности достигать труднодоступных мест. 2013 г., декабрь 9(4):396-406.
2013 г., декабрь 9(4):396-406. Навыки, которые я приобрел за это время, помогли мне буквально выжить.
Навыки, которые я приобрел за это время, помогли мне буквально выжить. Любые отклонения от нормы говорят о том, что что-то не так.
Любые отклонения от нормы говорят о том, что что-то не так. Манипулятор может постучать ногой или начать щелкать ручкой, чтобы намеренно передать эти эмоции и вызвать у жертвы чувство вины. Постукивание ногами также может заставить вас поторопиться с решением, что может сыграть на руку манипулятору.
Манипулятор может постучать ногой или начать щелкать ручкой, чтобы намеренно передать эти эмоции и вызвать у жертвы чувство вины. Постукивание ногами также может заставить вас поторопиться с решением, что может сыграть на руку манипулятору.
